


Crack-related catastrophic pump failures have been reported worldwide. Cracks are often reported in rotating components. A propagating crack in a pump shaft or a rotor assembly can affect pump vibration. These cracks are primarily detected based on the changes in 1X, 2X and sometimes 3X vibrations.
Many mechanical or thermal causes can initiate a crack. Afterward, the crack growth could be driven by a combination of thermal and mechanical loads, particularly those causing alternate cyclic stress in the shaft. A crack is often influenced by mechanical stresses (particularly bending stresses), thermal stress fields and liquid pressure in the cracked area.
Crack Causes
For many pumps, high mechanical and high thermal stresses can arise in the geometric transition zone. Thermal fatigue is the reason for many crack initiations. Some cracks originate from surface micro-cracks, which can be caused by manufacturing or operational processes. On the shaft surface—especially where the shaft or sleeve contacts the liquid—the maximum stress can be expected because of the maximum thermal gradient and/or the maximum bending effect. Even if a shaft sleeve is used, high stress could still occur on the shaft surface.
The location of the thermal boundary zone in a shaft is critical. If the thermal boundary is located above the crack, the tensile stresses develop in correspondence with the crack and can further its opening. If the thermal boundary is below the crack, the compressive stresses can generate forces that could close the crack.
A Cracked Shaft
A cracked shaft represents a severe malfunction in a pump and should always be considered dangerous. A cracked shaft may result in:
- A stiffness reduction, resulting in rotor anisotropy
- A shift of the elasticity axis (the rotor bows), which affects the balance state
An analytical formulation of a cracked shaft has periodically variable stiffness with two times the rotor speed (because a cracked pump rotor presents two events at each rotation). In other words, the radial load is applied to the rotor two times per rotation because of the periodically variable stiffness. An additional unbalance-like excitation with a 270-degree phase lag also exists. The early diagnosis of a cracked shaft is based mainly on changes in 1X and 2X vibration vectors. These data can be monitored at steady-state conditions and also during transient startup (or shutdown) conditions. The latter data are especially meaningful because the vibration changes are significant in the 1X and 2X.
The deviation of 1X and 2X vibration data from their acceptance regions, which are based on normal operating conditions, can provide alarms and early warnings of a cracked rotor. The rotor centerline position and slow-roll data can provide additional information about the rotor bow situation. The observation of the orbits is also helpful in diagnosing a crack in a shaft. A high 2X vibration component causes the appearance of an internal loop on the rotor orbit (the 2X orbit is forward). The crack-related weakening of the rotor in a constant-speed operation and a shift in the natural frequency can be detected during constant rotating speed. At a certain time, the 1X or 2X vectors exhibit resonant features.
1X, 2X & 3X Vibrations
A propagating crack generally produces a bow, which can be magnified by mechanical or thermal stresses and also by the liquid pressure penetrating the two crack faces if the cracks contact the pumped liquid. This bow can generate high amplitude 1X vibrations. The 1X vibration components are generated by the crack-related bow and by the mechanical, thermal and hydraulic unbalances. The 1X vibration increases consistently when the unbalance is in phase with the bow. This situation is most likely to occur because the crack usually originates from micro-cracks in which the maximum stresses are developed.
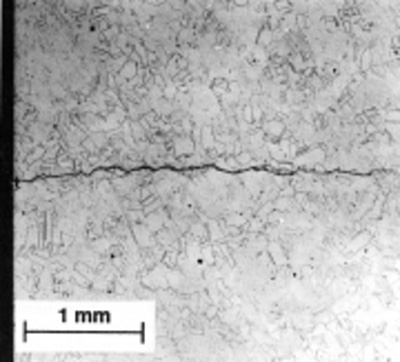 Image 1. A crack in a pump shaft
Image 1. A crack in a pump shaftThe 2X analysis is usually the most convenient crack-detection method. An open crack generates 2X vibration components, which can be proportional to the depth of the crack, the bending moment and different loads, such as hydraulic forces. The relationships are usually nonlinear. A crack with a small depth would only generate a weak excitation of the 2X component. Detecting a crack from an abnormal evolution of the 2X vibration component could be difficult. Sometimes, the 2X component is so small that it may be masked by noises. In such cases, a crack is only recognizable with advanced filtration methods—such as a nonlinear, Kalman filter analysis or similar advanced nonlinear filters.
The 2X vibration amplitude can be a highly nonlinear function of the depth. For example, a 15-percent increase in the crack depth resulted in a more than 40-percent increase in the 2X vibration amplitude. The 2X vibration components are also proportional to the liquid radial forces. If a pump operates far from the design point (its rated point or best efficiency point), it may consistently increase the hydraulic load and the 2X vibration.
The combination of crack excitations and 1X excitation can also generate a 3X vibration. A 3X vibration component is usually smaller than 2X vibration. However, in special incidences, the 3X vibration could occur at the same order or even slightly higher than the 2X component.
Crack Detection
The dynamic load, the stiffness and the damping of the pump bearing and seal can show a high sensitivity to small differences in the design, manufacturing details and tolerances, assembly (assembling tolerances), and operational effects (such as degradation). The dynamic responses and vibration measurements of similar pumps can differ because of these effects. A theoretical prediction of the exact vibration behavior, such as the vibration amplitude, of a cracked shaft would not be suitable or possible for crack detection. Trending can be the best tool for this purpose.
Increases of 1X, 2X and 3X vibration measurement amplitudes from their acceptable regions can help detect a crack. Many other vibration indications, which can be monitored, also exist. For example, the vibration measurements can be useful at transient conditions. The starting and the run-down transients of pumps are often too fast to allow the collection of significant data. However, high 1X and 2X amplitudes (compared to normal levels) could be the most significant indicators of a crack. The vibration measurements can be positioned far from the crack. The vibration amplitudes will increase in all locations of a shaft. Usually, the vibrations in different parts of a shaft may be at least 15 percent of its maximum (located close to the excitation).
 Image 2. Defects on an axial pump impeller
Image 2. Defects on an axial pump impellerCase Study
This case study discusses a crack initiation and propagation in a pump shaft. In this pump, the steady-state 1X and 2X vibrations were reported at around 26 microns and 7 microns, respectively. During a 10-day period, the 1X and 2X vibrations increased to 42 microns and 11 microns, respectively, which is approximately a 60- to 70-percent increase.
After another 10 days (a total of 20 days), the 1X and 2X vibrations reached 77 microns and 18 microns, respectively—about three times the established normal operating vibrations. The pump tripped and the shaft was inspected. The high vibration was caused by a propagating crack on the shaft.
Conclusion
Thermal stresses and bending stresses are usually responsible for micro-crack generation, crack initiation and propagation of the crack. Generally, thermal loads, bending stresses, axial loads, mass unbalances and liquid pressure (pumped liquid) entering two crack faces can generate a stress distribution within the shaft and help increase a crack. The influence of the axial force keeps the crack open, and the liquid pressure on the crack faces acts in the same way. Crack detection in a rotating assembly is generally based on the changes in 1X and 2X vibrations and, sometimes, 3X vibrations.